SLIMはほぼ逆立ち状態
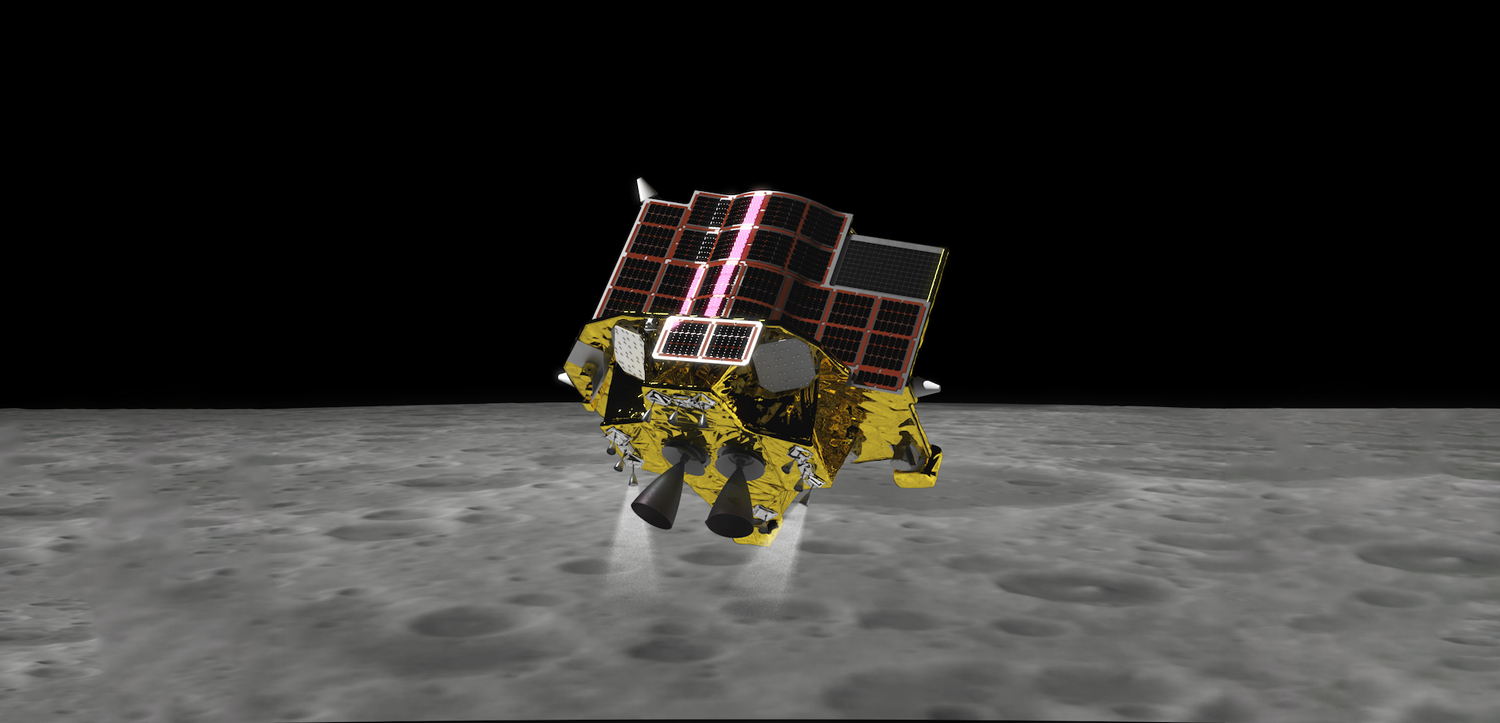
JAXA 宇宙科学研究所が2024年1月25日(木)14:00からの記者会見で明らかにした小型月着陸実証機SLIM (Smart Lander for Investigating Moon)の着陸姿勢です。メインエンジンが上を向いたほぼ逆立ちになった姿勢で、太陽電池パネルが西側を向いた姿勢です。太陽は現在、東方向にあることから発電できない状態となっています。
SLIMは高度50m付近までは正常に降下したものの1月20日(土)0時19分18秒ごろ、2つあるメインエンジンのうち1つの推力が失われて推力が55%程度にまで低下。このため横方向の速度や姿勢が崩れた影響で接地条件の範囲に収まらず、接地後の姿勢が想定と異なる姿勢となったと考えられるとのことです。
推力が失われた原因は不明とのことで引き続き調べるとしています。
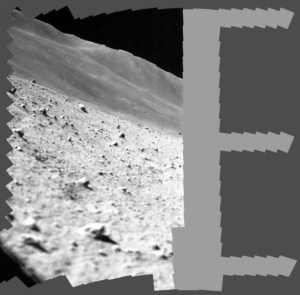
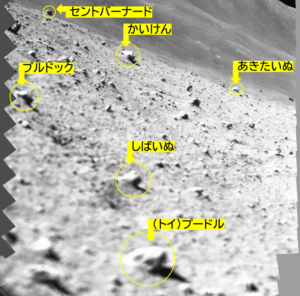
一方で目指したピンポイント着陸の着陸精度は10m以下(恐らく3-4m程度)と「100点満点」。このほか着陸後に撮影する予定だった月面画像を257枚、地球に送ることに成功、これらから合成されたモザイク画像が公開されました。
SLIMが撮影した月面のモザイク画像
ピンポイント着陸は「100点」だったもの総合で「63点」
記者会見で國中均所長は着陸直後の「60点」(SLIM着陸成功)に3点加点(マルチバンド分光カメラ(MBC)による月面画像の撮影、別途放出した超小型月面探査ローバ(LEV-1)、変形型月面ロボット(LEV-2)の稼働が各1点)して「63点」と評価しました。今後、発電が復活して画像撮影が追加でできるといったことによってさらに加点される可能性もありそうです。とはいえ着陸地点は2月1日以降、太陽光のあたらない温度環境が厳しい夜間となることから再稼働できるかは不明です。
衝撃吸収機構と化学推進システムは現段階で評価できず
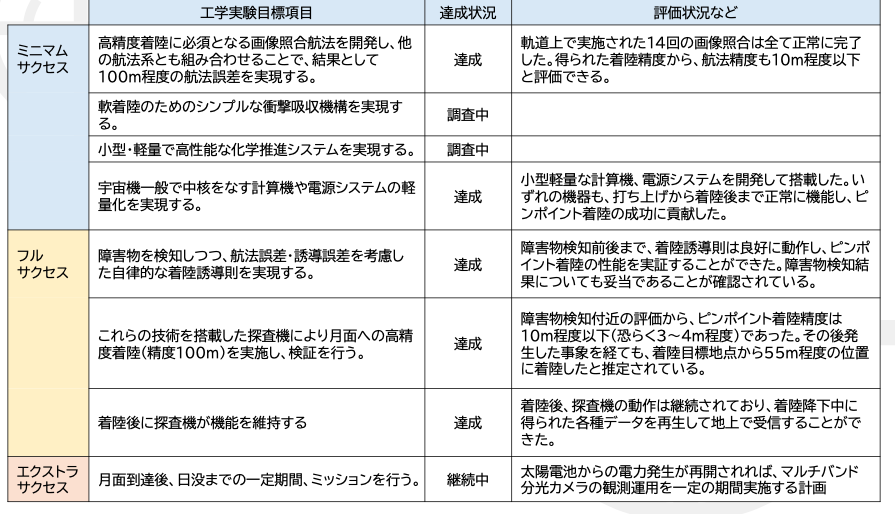
以下は1月25日の報道資料に明記された現段階での成果と課題です。衝撃吸収機構と化学推進システムの実現は調査中となっています。JAXA 宇宙科学研究所は過去2回、SLIMに搭載されしたメインエンジンと同等の推力をもった推進システムの運用に失敗。今後、予定される火星探査においても同等のエンジンを活用することとしており、今回の原因究明は急務といえそうです。